-
 Serie 2R
Serie 2R -
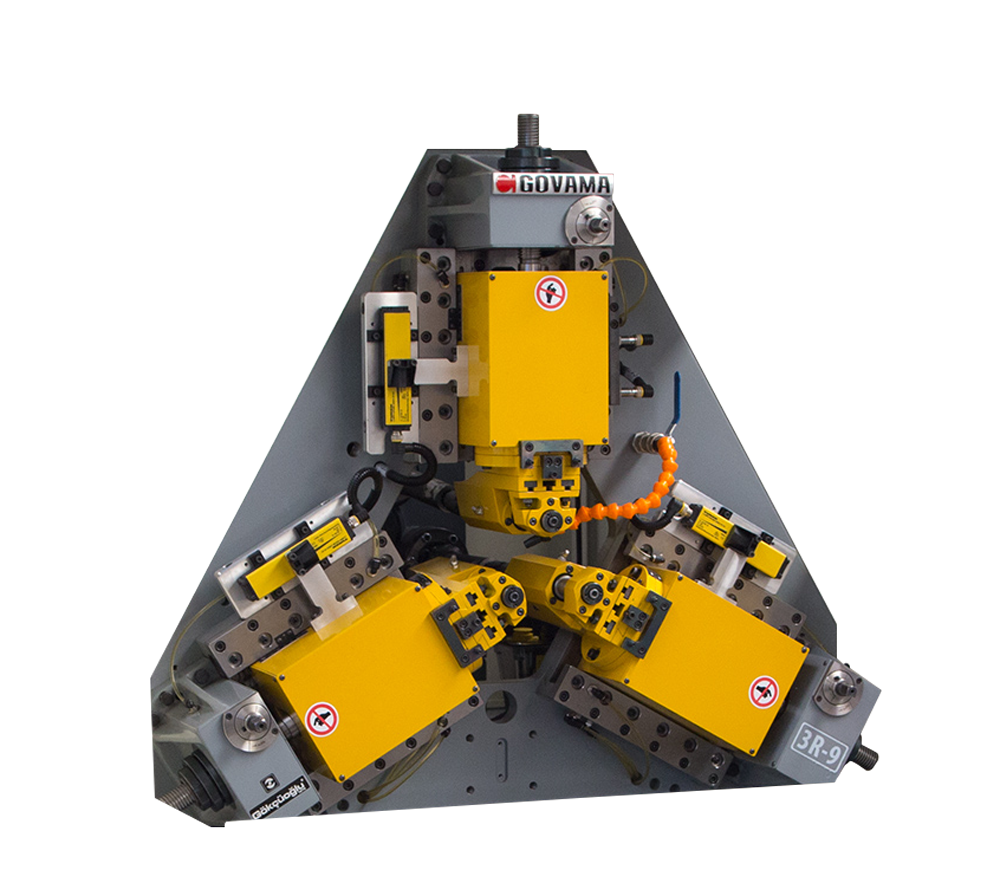
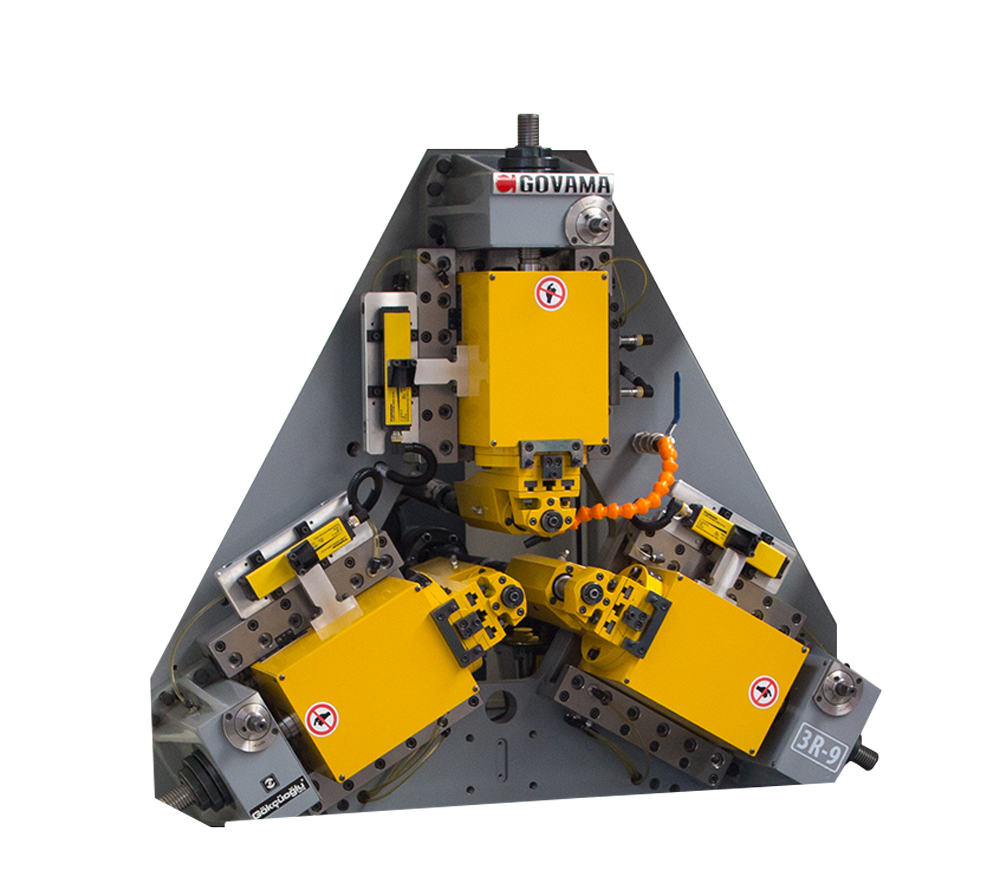
 Serie 3R
Serie 3R -
 Maquinas Para Para Trabajos Especiales
Maquinas Para Para Trabajos Especiales -
 Maquinas De Rodillo Y Sector
Maquinas De Rodillo Y Sector -
 Maquinas Especiales
Maquinas Especiales -
 Dispositivos Especiales
Dispositivos Especiales -
 Aplicaciones De Alimentacion Automatica
Aplicaciones De Alimentacion Automatica












{kind=link}
{kind=link}